Traffic III: Why doesn't Changing Lanes Always Work?
Contents
Recall in the previous post, the lanes with more traffic flow (with more cars per minute passing a certain point) back up more when there’s congestion. This can be summarized by the following picture:
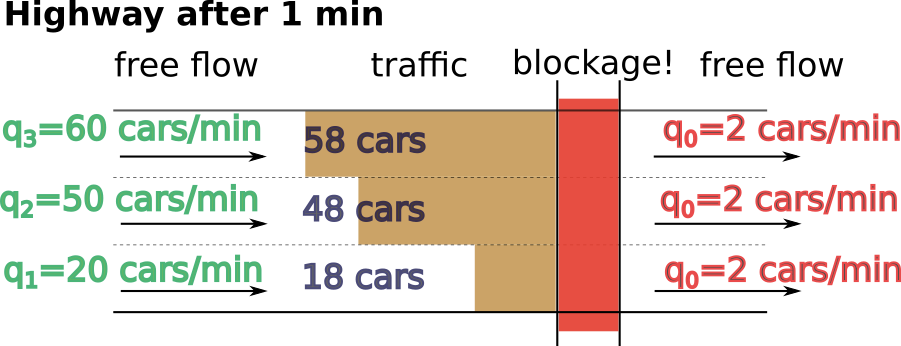
The pressing question from that post was, why not just change lanes to the faster one, as you’re approaching the congestion?
Series on Car Traffic modeling
Inspired by my almost daily commute on California Highway 101, I explored the achievements of traffic theory and found answers to the most pressing mysteries of my commute.
Modeling timing in lane changes.
The short answer is: if you already got stuck in a slow lane, and the next lane over is faster, then it’s pretty hard to merge into it due to the speed difference.
Many of the traffic models I read about do not consider the distribution of cars across the traffic lanes, so I couldn’t find readily available research for multi-lane traffic. Let’s speculate about this, just for the fun of it. This is not based on any of the existing models, and I’m sure there are some.
A car can merge if the total time it takes to (a) physically drive to the other lane and (b) accelerate to the speed of the traffic in that lane, is smaller than (c) the time that passes between two cars in the other lane passing the same point.
$T_a$ is actually the time it takes to physically travel the width of the lane w, which is either distance
over the horizontal component of the velocity vector (assuming $\alpha$ is the entry angle). Alternatively,
if the initial velocity is low, the acceleration component takes over. Don’t discount that, traffic lanes are
unexpectedly wide (just like the white stripes are unexpectedly long).
$$\begin{align*}
T_a =& \frac{w}{v_3\cos\alpha}, T_a’ = \sqrt{\frac{2w\cos\alpha’}{a}} \
T_b =& \frac{v_2 - v_3}{a} \
T_c =& \frac{1}{q_2}
\end{align*}$$
Actually, we should put $T_b$ to somewhere between 0.5x and 1x of what it is, because in a forced merge,
the other driver will be decelerating to prevent a collision but we need to factor their reaction time..
We could just leave it here, and say that merging requires the following condition:
$$T_c > T_a + T_b$$
But note that as the lane you’re in (lane 3) slows down, $T_b$ becomes larger ($v_3$ decreses), while other parameters stay at the same level. So the lesson from this is change lanes before you’re stuck; otherwise it might be too late.
But merges like that stil occur; why?
On a real highway, while $T_a$ and to a large extent $T_b$ (except for the trick described in the side note) are not under the control of the driver, $T_c$ is not actually constant. Temporal short-term fluctuations are sometimes sufficient to merge out of the slow lane, and their variance is larger in slower traffic.
How can a merging driver control $T_b$ in bumper-to-bumper traffic when the lane moves with speed $v_{max}$ which seemingly must equal $v_2$? So it might seem that $T_b > \frac{v_{max}}{a}$. There’s a trick. In order to cheat this equation, when the driver in front of me accelerates, I might just wait a bit, leave myself a larger gap, and achieve speed larger than the average $v_{max}$ before starting to merge.
In other words, merging out of a slow lane requires waiting a bit to decrease $T_b$. Note that the gap doesn’t
have to be large (it’s a small multiple of the lane width w), so the cars merging into this gap from an even
slower lane shouldn’t be a problem.
A sensible assumption would be that the number of cars passing in the other lane, into which we want to merge,
within a given unit of time follows a Poisson distribution with $\lambda = q_2$ (where $q_2$ is
the flow measure of the other lane). Therefore, the probabiltiy there’ll be 0 cars passing within the time
it takes to merge $T = T_a + T_b$ can be approximated as $p = q_2T\cdot e^{-q_2T}$. If $q_2 = 40
\text{cars/min}$, and $T = 2\ \text{sec}$, then `p $\approx 0.35$.
It gets more complicated when we consider repeated observations though. The main point is, merging in heavy traffic can be modeled using simple mathematical equations.
“Friction”, or modeling the impact of slow lanes onto the fast ones.
The result from the previous section, is that a merge from the slow lane into the fast lane will happen with high probability. What effect does it have on the speed in the “fast” lane?
The impact I observed was that drivers either slow down or merge out of the lane adjacent to a stopped or a slow lane. I think it stems from a subconscious expectation that some driver will take advantage of the algorithm described above. Remember, the merging driver strived to decrease $T_b$.
$$T_b = \frac{v_2-v_3}{a + b}$$
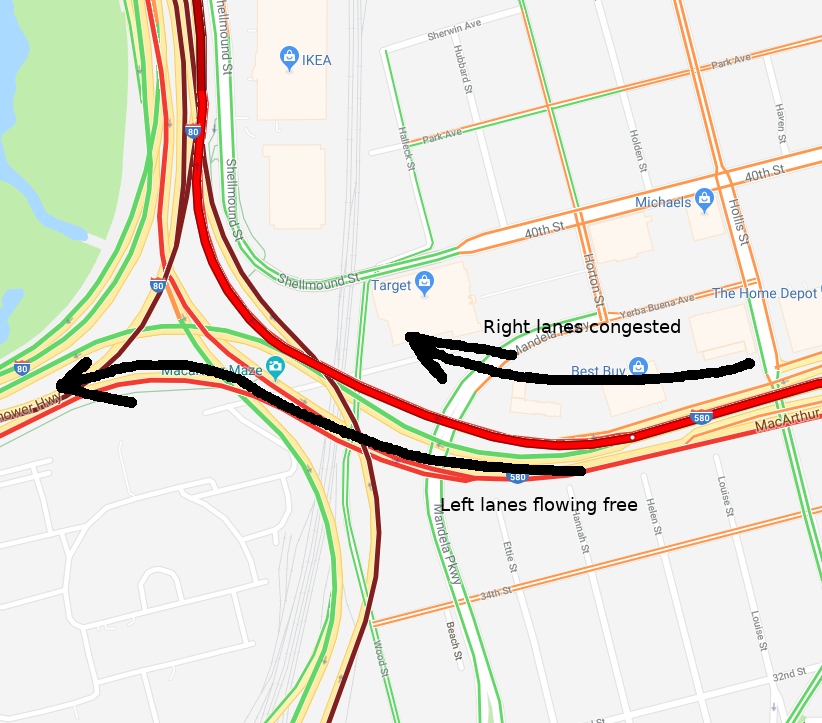
Indeed, if the merging drivers expect that $b \ne 0$, then the drivers in the target lane would naturally try to abvoid decelerating, and avoid being in that lane. I noticed this effect first when driving next to interchanges with congested exits, such as 580 West-80 East or 101 North-SR 109 North.
This naturally maps to a concept of “viscosity”, and is thus similar to the effects found in laminar flow.
So in some regards, the traffic flow does look like laminar flow after all.
***
In the next post, I’ll share videos of a traffic situation I repeatedly observe on the road and I’ll maybe attach a short commute guide for the Silicon Valley commuter.